The Internet of Things (IoT) in the automotive sector represents a fundamental architectural shift. Vehicles are no longer isolated mechanical systems but interconnected digital platforms. Functionally, a modern vehicle operates as a sophisticated, mobile data centre, comprising a network of sensors, Electronic Control Units (ECUs), and software communicating with each other and external cloud infrastructure.
This guide provides a technical overview for founders, CTOs, and product leaders tasked with building or operating these complex systems. We will examine the architectural components, common implementation patterns, and the critical security and compliance considerations that define a robust automotive IoT strategy.
The Business Case and Technical Drivers for Automotive IoT
Integrating IoT into vehicles is not an optional feature; it is a strategic imperative driven by regulatory requirements, operational pressures, and new business models. For technical leaders, understanding these drivers is critical, as they translate complex engineering work directly into quantifiable business outcomes.
Regulatory and Safety Mandates
Governments worldwide are mandating vehicle connectivity to enforce safety standards. The European Union’s eCall regulation, for example, requires new vehicle models to automatically transmit their location to emergency services following a serious collision.
This single requirement necessitates a reliable cellular connection and a GPS module as standard equipment, not a luxury add-on. Engineering systems to meet such mandates creates a foundational connectivity layer that can be leveraged for a wide range of commercial services, effectively amortizing the initial development cost.
Operational Efficiency in Commercial Fleets
For any commercial fleet—whether in logistics, delivery, or service industries—operational efficiency is a primary cost driver. The internet of things automotive ecosystem provides the necessary tools to optimize fleet performance.
By connecting vehicles, fleet managers gain unprecedented visibility into their operations. This is not merely about tracking assets on a map; it involves translating raw telemetry data into actionable business intelligence that directly impacts profitability.
This intelligence drives cost savings through:
- Optimized Routing: Real-time traffic and vehicle location data enable dynamic route planning, reducing fuel consumption and delivery times.
- Predictive Maintenance: Monitoring engine diagnostics and component health data helps predict failures before they occur, minimizing unplanned downtime and extending vehicle lifespan.
- Driver Behavior Analysis: Analyzing telemetry on acceleration, braking, and speed helps improve safety protocols and reduce fuel waste.
New Revenue Models and Customer Experiences
Beyond safety and efficiency, connectivity enables entirely new business models predicated on software and data. Automakers are transitioning from a model based on one-time hardware sales toward cultivating ongoing customer relationships through subscription-based services.
Services such as advanced navigation, in-car entertainment, remote diagnostics, and usage-based insurance (UBI) all depend on a robust IoT architecture. This shift means a vehicle’s long-term value is increasingly defined by its software capabilities and the experiences it can deliver over its lifecycle. For CTOs and product leaders, investing in a scalable and secure IoT platform is essential for future-proofing vehicles in a market where software defines brand differentiation.
A Reference Architecture for Automotive IoT
A robust automotive IoT platform is not a monolithic application. It is a layered, distributed system engineered for resilience, scalability, and security. For technical leaders, conceptualizing the architecture in distinct functional layers helps clarify ownership, identify potential bottlenecks, and make informed design trade-offs. This blueprint illustrates the data flow from an in-vehicle sensor to a cloud-based service.
The entire system can be viewed as a sophisticated data pipeline. It ingests raw signals from the physical world and refines them into insights that drive business logic, optimize vehicle performance, or create new user experiences. Each layer performs a critical role in this transformation.
The business drivers—Safety, Efficiency, and Services—provide the technical architecture with its purpose.
This relationship is straightforward: connectivity is the foundational enabler. All modern automotive features are built upon this layer, creating a direct link from technical implementation to business outcomes.
Core Architectural Components and Functions
The following table outlines the essential layers of the architecture, from in-vehicle hardware to the cloud backend. A clear understanding of each layer’s function and associated technologies is critical for designing a resilient and scalable solution.
| Architectural Layer | Primary Function | Key Technologies & Protocols | Implementation Considerations |
|---|---|---|---|
| In-Vehicle Systems | Senses the environment and vehicle state; executes commands. | Sensors, ECUs, Actuators, CAN bus | Real-time processing constraints, hardware durability, inter-component communication latency. |
| Vehicle Gateway | Aggregates, filters, and securely transmits data off-vehicle. | Telematics Control Unit (TCU) | Edge processing capacity, connectivity options (4G/5G), power management, OTA update integrity. |
| Connectivity | Provides the communication link between the vehicle and the cloud. | Cellular (4G/LTE, 5G), DSRC, C-V2X | Latency, bandwidth, coverage reliability, cost-per-device, and failover strategy across networks. |
| Cloud Platform | Ingests, stores, processes, and exposes vehicle data via APIs. | IoT Hubs, Data Lakes, APIs, ML Platforms | Scalability for millions of devices, data security and compliance (GDPR, etc.), multi-tenancy. |
Each layer presents unique engineering challenges and trade-offs. They must operate cohesively to deliver a reliable and valuable service.
The In-Vehicle Systems Layer
This layer is where data originates. It consists of the complex network of hardware within the vehicle that senses, computes, and actuates.
Key components include:
- Sensors: The vehicle’s sensory system, capturing data points from wheel speed and engine RPM to GPS coordinates, ambient temperature, and camera feeds.
- Electronic Control Units (ECUs): A modern vehicle can contain over 100 of these specialized microcomputers. Each ECU manages a specific function, such as engine control, anti-lock braking, or the infotainment system.
- Actuators: These components execute physical actions based on commands from ECUs, such as adjusting the throttle, applying brake pressure, or locking the doors.
A naive architecture might treat these as isolated data sources. A robust system requires a unified method for accessing their signals, typically via an internal network like the Controller Area Network (CAN) bus.
The Vehicle Gateway Layer
The vehicle gateway, often implemented as a Telematics Control Unit (TCU), serves as the central hub for the connected vehicle. It bridges the vehicle’s internal networks with the external world and is arguably the most critical hardware component in any automotive IoT system.
Its primary responsibilities are:
- Data Aggregation: The TCU interfaces with various vehicle networks (CAN, LIN, FlexRay) to collect relevant data from disparate ECUs.
- Filtering and Pre-processing (Edge Computing): Transmitting all raw sensor data to the cloud is inefficient and cost-prohibitive. The gateway performs edge processing—filtering noise, compressing data, and running local analytics to determine what data is valuable enough to transmit.
- Secure Communication: The TCU acts as the gatekeeper, establishing a secure, authenticated, and encrypted connection to the cloud for all inbound and outbound data.
The selection of a gateway is a critical architectural decision, involving a trade-off analysis between processing power, connectivity options (e.g., 4G vs. 5G), and power consumption.
The Connectivity Layer
This layer is the data transport medium linking the vehicle to the cloud platform. The choice of technology directly impacts system reliability, latency, and operational cost. There is no single “best” solution; the optimal choice is use-case dependent.
Common connectivity options include:
- Cellular (4G/LTE, 5G): The default choice for broad coverage, providing the necessary bandwidth for telematics, over-the-air (OTA) updates, and media streaming.
- Dedicated Short-Range Communications (DSRC): A Wi-Fi-based standard designed for low-latency Vehicle-to-Everything (V2X) communication, ideal for safety-critical applications like collision warnings.
- Cellular V2X (C-V2X): Uses cellular networks for direct vehicle-to-vehicle and vehicle-to-infrastructure communication, offering an alternative to DSRC with potentially longer range.
A resilient system often employs a hybrid approach, with logic in the gateway to switch between technologies based on availability, cost, and the specific requirements of the data being transmitted.
The Cloud Platform Layer
Data transmitted from the vehicle is ingested and processed by the cloud platform. This backend infrastructure must be designed for massive scale, high availability, and stringent security. For teams weighing their options, our guide on cloud computing versus on-premise solutions details the relevant trade-offs.
A typical cloud platform for automotive IoT includes:
- Data Ingestion: A highly scalable entry point, such as an IoT message broker, capable of handling concurrent data streams from millions of vehicles without performance degradation.
- Storage and Processing: A combination of databases and data lakes for raw telemetry storage, coupled with data processing engines for analytics and machine learning model training.
- Application Services: APIs that expose vehicle data and functionality to other applications, such as a fleet management dashboard, a consumer-facing mobile app, or a third-party partner integration.
The market scale is significant. The Asia Pacific internet of things automotive market alone held a 40.78% global share in 2025. With projections indicating growth from USD 37.20 billion in 2026 to USD 91.69 billion by 2034, the necessity for scalable cloud architecture is clear.
A well-architected cloud platform is more than a data repository; it is an innovation engine. It enables the development and remote deployment of new features and services, ensuring the platform remains valuable over the vehicle’s entire lifecycle.
Real-World Use Cases and Implementation Patterns
A sound architecture is a prerequisite, but its value is realized through the implementation of specific, high-impact business solutions. This is where theory translates into practice, demonstrating how the internet of things automotive framework transforms raw data into tangible services. This requires more than data collection; it requires applying proven software patterns to build reliable applications.
Below are three critical use cases that illustrate this transformation. Each addresses a distinct business problem, utilizes a unique combination of data, and is built using established implementation patterns.
Predictive Maintenance for Maximizing Uptime
The core business problem is the high cost of unexpected vehicle downtime. For a commercial fleet, a vehicle off the road translates directly to lost revenue and logistical disruption. The traditional “break-fix” maintenance model is inefficient and expensive.
The solution is to use vehicle data to forecast component failures before they occur. This transforms unplanned downtime into scheduled, efficient service appointments. In certain smart city applications, such efficiency gains have been shown to reduce vehicle wait times at intersections by as much as 40%.
The system must process several key data streams:
- CAN Bus Telemetry: Engine temperature, oil pressure, RPMs, and diagnostic trouble codes (DTCs) are fundamental inputs.
- Sensor Readings: Vibration sensors on specific components or battery voltage monitors provide granular health indicators.
- Usage Data: Odometer readings and engine hours provide essential context for modeling component wear.
The underlying software pattern is time-series analysis. Data is ingested into the cloud, where machine learning models are trained to identify the subtle patterns that precede a failure. When the model detects an anomaly in a live vehicle’s data stream, it triggers an alert for the fleet manager.
Fleet Management for Operational Visibility
The primary challenge for any fleet operator—from delivery services to long-haul trucking—is often a lack of real-time operational visibility and control. This opacity leads to inefficient routing, unauthorized vehicle use, unsafe driving practices, and wasted fuel.
A modern fleet management system provides a centralized command center, giving managers a complete operational picture to track assets, optimize logistics, and enforce safety protocols.
This use case relies on a combination of real-time and historical data:
- GPS Data: Provides the vehicle’s real-time location, speed, and heading.
- Accelerometer and Gyroscope Data: Essential for detecting harsh braking, rapid acceleration, and sharp cornering—all indicators of risky driving behavior.
- Fuel Level Sensors: Data from the CAN bus helps monitor fuel consumption and detect potential theft.
Implementation typically involves a real-time dashboard powered by APIs that serve processed vehicle data. Key software patterns include geofencing (triggering alerts when a vehicle enters or exits a predefined virtual boundary) and driver behavior analytics that generate safety scores.
A fleet management platform is not just about plotting locations on a map. It is a system of record that translates raw telemetry into actionable operational intelligence, enabling data-driven decisions on routing, driver training, and asset utilization.
Vehicle-to-Everything (V2X) for Cooperative Safety
The fundamental problem V2X communication solves is the inherent limitation of a vehicle’s onboard sensors. A car’s cameras, radar, and lidar are limited to their direct line of sight. They cannot perceive hazards around blind corners, through dense fog, or detect a vehicle braking hard several cars ahead.
V2X technology extends a vehicle’s situational awareness by enabling direct communication with other vehicles (V2V), infrastructure like traffic signals (V2I), and even pedestrians (V2P). This creates a cooperative safety network where vehicles can broadcast and receive warnings about hazards long before a driver or onboard sensor could detect them.
The data inputs for V2X are highly dynamic and time-sensitive:
- Basic Safety Messages (BSMs): A vehicle’s position, speed, acceleration, and braking status are broadcast multiple times per second.
- Infrastructure Data: Traffic light Signal Phase and Timing (SPaT) information allows a vehicle to anticipate a signal change.
- Hazard Alerts: Event-driven messages, such as a slippery road warning transmitted from a vehicle that has just detected wheel slip.
The implementation pattern for V2X requires low-latency communication protocols like DSRC or C-V2X. The software must process incoming messages in near real-time to make immediate decisions, such as alerting the driver to a potential collision. This is a classic example where edge computing is non-negotiable; reliance on the cloud would introduce unacceptable latency for safety-critical functions.
Integrating AI and Machine Learning
Data collection is only the first step. True value is unlocked when that data is used to predict, decide, and act. This is the domain of Artificial Intelligence (AI) and Machine Learning (ML), which transform a vehicle from a passive sensor hub into an intelligent, predictive system.
This is not a marketing exercise. It is about fundamentally changing vehicle operation, maintenance, and the user experience. For technical leaders, the challenge is not merely selecting an algorithm but architecting a system that can effectively manage AI workloads.
A critical architectural decision is where to process data: directly on the vehicle (Edge AI) or in the cloud (Cloud-based ML). Each approach solves a different class of problems. A robust system does not choose one over the other; it orchestrates both.
The Edge AI vs. Cloud ML Trade-Off
The decision of where to run an AI model is a foundational architectural choice, driven by a trade-off analysis between latency, cost, and complexity. Neither is a universal solution.
The core principle is straightforward: use Edge AI for immediacy and Cloud ML for depth. Real-time actions that affect the immediate driving experience belong on the edge. Complex, fleet-wide analysis belongs in the cloud.
Edge AI for Real-Time Decisions
Edge AI involves running lightweight ML models directly on the vehicle’s hardware, such as a gateway or a dedicated ECU. The key advantage is low latency. When a decision must be made in milliseconds, a round trip to the cloud is not feasible.
Edge AI applications include:
- Driver Monitoring Systems (DMS): An in-cabin camera feeds an edge model that detects signs of driver fatigue or distraction. The system triggers an alert instantly without cloud consultation.
- Imminent Hazard Alerts: A model processing local sensor data (radar, lidar) can identify a sudden obstacle, priming the braking system fractions of a second faster than human reaction time.
- Adaptive Cruise Control: Edge models continuously adjust vehicle speed based on the immediate traffic flow, operating reliably without a persistent internet connection.
The primary constraint is the finite processing power of in-vehicle hardware. Edge models must be lean and highly optimized, which can sometimes involve a trade-off in accuracy compared to larger, cloud-based counterparts.
Cloud-Based ML for Fleet-Wide Intelligence
The cloud provides the computational power for large-scale analysis. It enables the training of complex models on aggregated data from thousands or millions of vehicles, uncovering insights that are invisible from the perspective of a single vehicle.
Common use cases for cloud-based ML include:
- Predictive Maintenance: By analyzing telemetry from an entire fleet, cloud models can identify the faint signals that predict a specific component failure. This model can then be used to generate alerts for individual vehicles or fleet managers.
- Route Optimization: A model can process historical traffic data, weather patterns, and real-time events from thousands of vehicles to calculate the most efficient routes for an entire logistics fleet.
- Insurance Risk Modeling: Insurers use aggregated data on driving behavior—such as harsh braking and acceleration events—from a large pool of drivers to build more accurate risk profiles.
The main constraint is connectivity. Cloud-dependent functions are unavailable if a vehicle is offline, making this approach unsuitable for safety-critical, real-time applications. A clear strategy is essential when architecting these systems. For a deeper analysis, see our guide on how to structure your AI project for success.
Orchestration and Human-in-the-Loop (HITL) Controls
A mature automotive IoT system orchestrates both edge and cloud models. For instance, an edge model might detect an unusual engine vibration. Instead of triggering a generic alert, it could transmit a compressed “event snapshot” to the cloud. A more powerful cloud model could then analyze the vehicle’s full maintenance history to confirm if the event matches a known failure pattern.
This orchestration requires robust APIs and, critically, human oversight. A human-in-the-loop (HITL) process is essential for governance and safety. For example, when a cloud model flags a vehicle for critical maintenance, the final decision to schedule service should be validated by a human expert. This adds a crucial layer of accountability, ensuring automated systems operate within safe and predictable boundaries.
Navigating Security, Privacy, and Compliance
In the internet of things automotive domain, security and privacy are not features; they are fundamental architectural requirements. A superficial approach that treats security as a checklist will inevitably lead to breaches, regulatory penalties, and a catastrophic loss of customer trust. Building resilient, trustworthy systems demands a security-first methodology from the initial design phase.
The threat landscape is extensive and complex, encompassing physical, network, and software-level attacks. A comprehensive threat model is non-negotiable.
The Automotive Threat Landscape
Technical and compliance leaders must prepare for a range of risks specific to connected vehicles. These are not theoretical problems but active attack vectors demanding robust mitigation strategies.
Key threats include:
- Vehicle Bus Attacks: Unauthorized access to the internal Controller Area Network (CAN) bus allows an attacker to send spoofed commands, potentially controlling critical functions like braking or steering.
- Data Interception: Man-in-the-middle attacks on the vehicle-to-cloud communication link can expose sensitive telemetry, personal data, or authentication credentials.
- Cloud Platform Breaches: A compromised cloud backend can grant attackers access to data from an entire fleet, enabling mass vehicle tracking or data exfiltration.
- Insecure Over-the-Air (OTA) Updates: A compromised OTA update mechanism could be used to deploy malicious firmware to thousands of vehicles simultaneously, creating a widespread safety or security incident.
This landscape is particularly critical in regulated markets. For instance, Europe’s automotive IoT market commanded a 24% global share in 2023, largely driven by stringent vehicle safety regulations. The demand for secure telematics is fueling a projected 14.8% CAGR in the services segment from 2024 to 2030. More details on these trends are available in the full Grand View Research report.
A Framework for Mitigation
Addressing these threats requires a layered, defense-in-depth strategy grounded in the principle of Privacy by Design. This means security and privacy considerations must inform every architectural decision. Our guide on implementing Privacy by Design principles offers a deeper exploration of this philosophy.
Privacy is not a feature added at the end of a project. It is an architectural choice that dictates how data is collected, processed, and protected throughout its entire lifecycle. Failure to embed it from day one creates systemic risk.
Essential mitigation strategies include:
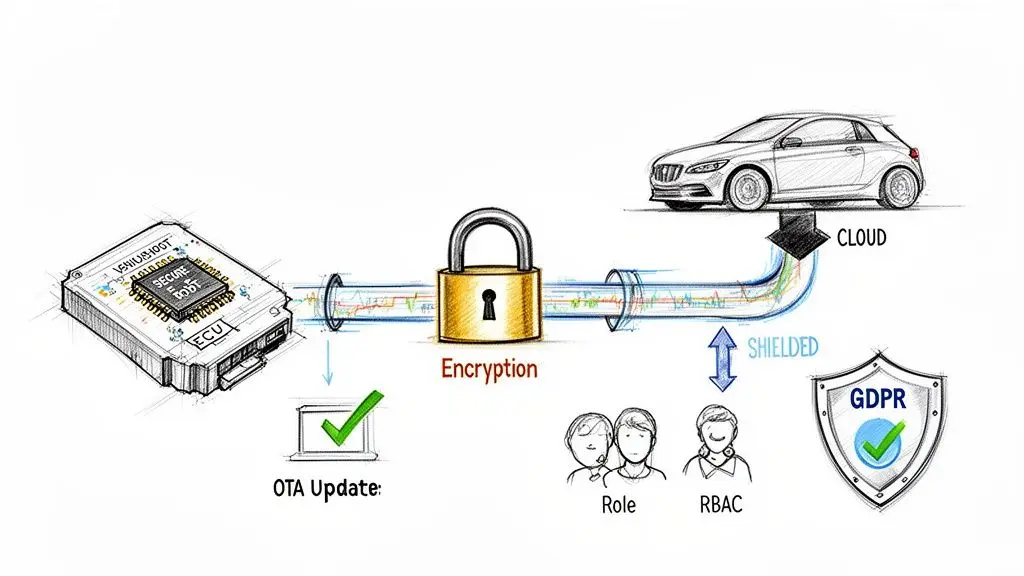
- End-to-End Encryption: All data transmitted from the vehicle must be encrypted in transit (e.g., using TLS) and at rest within the cloud infrastructure to prevent interception and unauthorized access.
- Secure Boot Processes: The vehicle’s gateway and critical ECUs must implement a secure bootloader that cryptographically verifies the signature of the firmware before execution, preventing unauthorized code from running.
- Role-Based Access Control (RBAC): Within the cloud platform, access to sensitive vehicle data must be strictly controlled based on a user’s role, ensuring a compromised low-privilege account cannot access critical systems.
- Secure OTA Mechanisms: OTA updates must be cryptographically signed, and the vehicle must verify this signature before applying any update, guaranteeing the integrity and authenticity of the firmware.
Navigating the Regulatory Landscape
Compliance is not optional. Regulations like the General Data Protection Regulation (GDPR) impose strict rules on the handling of personal data, including location and driving behavior. Newer directives such as NIS2 are expanding cybersecurity obligations for critical infrastructure, which can encompass large vehicle fleets.
For compliance managers and CTOs, this means every data flow must be mapped, every processing activity must have a defined legal basis, and robust security measures must be demonstrably in place. Failure to comply can result in severe financial penalties and reputational damage that far exceed the initial investment in building a secure and compliant system.
Conclusion: Key Takeaways for Technical Leaders
For founders, CTOs, and product leaders in the automotive sector, a successful IoT strategy rests on three core principles.
First, implement a pragmatic and scalable architecture. This requires making deliberate trade-offs between edge and cloud processing and building data pipelines designed for intermittent connectivity and massive data volumes. Prioritize systems that are maintainable over the long term.
Second, recognize that security and privacy are architectural decisions, not features. A compliance-as-checklist approach is insufficient. Embed end-to-end encryption, secure OTA updates, and robust access controls from the project’s inception to build a trustworthy platform.
Finally, ensure every technical decision has a clear line of sight to business value. Whether optimizing fleet logistics or developing a new subscription service, the objective is to transform vehicle data into a measurable outcome. True innovation in this space is built on a foundation of sound engineering—creating systems that are reliable, compliant, and deliver tangible value.
Frequently Asked Questions
What are the primary architectural challenges in automotive IoT?
The three most common challenges are managing intermittent connectivity, ensuring end-to-end data security, and handling the sheer volume of sensor data. A robust architecture must be designed to function during offline periods, implement strong encryption from the vehicle to the cloud, and utilize data pipelines that can scale effectively.
A critical trade-off is the balance between edge and cloud processing. This decision involves a constant negotiation between latency, cost, and processing capability. A poorly designed strategy can lead to excessive data transfer costs or a system with unacceptable latency for its intended use case.
How do you ensure data privacy and security in connected vehicles?
A defense-in-depth strategy is essential. This starts within the vehicle with a hardware root of trust, such as a Hardware Security Module (HSM), which secures all cryptographic operations.
From there, it requires encrypted communication channels (e.g., TLS) and a secure cloud platform with strict access controls. Most importantly, the entire system must be built with a privacy by design methodology. This means principles like data minimization and anonymization are integral to the architecture, not afterthoughts.
Security is not a feature added at the end of a project. It is an architectural choice that dictates how data is collected, processed, and protected throughout its entire lifecycle.
Regular security audits and a reliable Over-the-Air (OTA) update mechanism are also non-negotiable for maintaining system integrity over time.
What is the difference between edge and cloud processing in an automotive context?
Edge processing occurs directly on the vehicle’s onboard hardware, such as the Telematics Control Unit (TCU). It is ideal for decisions requiring millisecond-level latency where a stable internet connection cannot be guaranteed, such as a collision warning or a driver alertness system.
Cloud processing involves transmitting data to remote servers for computationally intensive tasks. This is used for training complex machine learning models on fleet-wide data or performing deep analytics on historical trends. The choice between them depends on the required response time, connectivity reliability, and the computational resources needed for the task.
How can a business initiate a pilot project for fleet telematics?
Start with a focused and simple objective. The goal of a pilot is to validate the concept, not to build the final product. Begin with a small number of vehicles and one or two key metrics, such as real-time GPS tracking and fuel consumption data from the CAN bus.
Utilize off-the-shelf telematics devices to accelerate deployment and minimize initial costs. The primary objectives are to validate the business case, test the data pipeline, and define the essential requirements for operational dashboards. This iterative approach minimizes risk and helps build a strong justification for a full-scale rollout.
At Devisia, we specialize in transforming complex business visions into reliable digital products and AI-enabled systems. We build scalable, secure, and maintainable software with a focus on measurable business value. To discuss how we can help you build your next automotive IoT platform or modernise an existing one, visit us at https://www.devisia.pro.