
L’Internet delle Cose (IoT) nel settore automotive rappresenta un cambiamento architettonico fondamentale. I veicoli non sono più sistemi meccanici isolati, ma piattaforme digitali interconnesse. Dal punto di vista funzionale, un veicolo moderno opera come un sofisticato data center mobile, composto da una rete di sensori, centraline elettroniche (ECU) e software che comunicano tra loro e con l’infrastruttura cloud esterna.
Questa guida fornisce una panoramica tecnica per founder, CTO e responsabili di prodotto incaricati di costruire o gestire questi sistemi complessi. Esamineremo i componenti architetturali, i pattern di implementazione più comuni e le considerazioni critiche in materia di sicurezza e conformità che definiscono una strategia IoT automotive robusta.
Il caso di business e i driver tecnici per l’IoT automotive
Integrare l’IoT nei veicoli non è una funzione opzionale; è un imperativo strategico guidato da requisiti normativi, pressioni operative e nuovi modelli di business. Per i leader tecnici, comprendere questi driver è fondamentale, poiché traducono il lavoro ingegneristico complesso direttamente in risultati di business quantificabili.
Mandati normativi e di sicurezza
I governi di tutto il mondo stanno imponendo la connettività dei veicoli per far rispettare gli standard di sicurezza. La normativa eCall dell’Unione Europea, ad esempio, richiede che i nuovi modelli di veicoli trasmettano automaticamente la propria posizione ai servizi di emergenza in seguito a una collisione grave.
Questo singolo requisito rende necessario un collegamento cellulare affidabile e un modulo GPS come dotazione standard, non come optional di lusso. Progettare sistemi ingegneristici per soddisfare tali mandati crea un livello di connettività di base che può essere sfruttato per un’ampia gamma di servizi commerciali, ammortizzando di fatto il costo iniziale di sviluppo.
Efficienza operativa nelle flotte commerciali
Per qualsiasi flotta commerciale—che si tratti di logistica, consegne o servizi—l’efficienza operativa è un primario fattore di costo. L’ecosistema internet of things automotive fornisce gli strumenti necessari per ottimizzare le prestazioni della flotta.
Collegando i veicoli, i fleet manager ottengono una visibilità senza precedenti sulle proprie operazioni. Non si tratta semplicemente di tracciare gli asset su una mappa; implica trasformare i dati di telemetria grezzi in business intelligence azionabile che incide direttamente sulla redditività.
Questa intelligence genera risparmi sui costi attraverso:
- Ottimizzazione dei percorsi: I dati in tempo reale sul traffico e sulla posizione del veicolo consentono una pianificazione dinamica dei percorsi, riducendo il consumo di carburante e i tempi di consegna.
- Manutenzione predittiva: Il monitoraggio della diagnostica del motore e dei dati sullo stato dei componenti aiuta a prevedere i guasti prima che si verifichino, riducendo i fermi non pianificati e prolungando la vita utile del veicolo.
- Analisi del comportamento di guida: L’analisi della telemetria su accelerazione, frenata e velocità aiuta a migliorare i protocolli di sicurezza e a ridurre gli sprechi di carburante.
Nuovi modelli di ricavo ed esperienze cliente
Oltre alla sicurezza e all’efficienza, la connettività abilita modelli di business completamente nuovi basati su software e dati. Le case automobilistiche stanno passando da un modello fondato sulla vendita una tantum dell’hardware a uno orientato a coltivare relazioni continuative con i clienti tramite servizi in abbonamento.
Servizi come navigazione avanzata, infotainment, diagnostica remota e assicurazione basata sull’uso (UBI) dipendono tutti da una solida architettura IoT. Questo cambiamento significa che il valore di lungo periodo di un veicolo è sempre più definito dalle sue capacità software e dalle esperienze che può offrire לאורך il suo ciclo di vita. Per CTO e responsabili di prodotto, investire in una piattaforma IoT scalabile e sicura è essenziale per rendere i veicoli a prova di futuro in un mercato in cui il software definisce la differenziazione del brand.
Un’architettura di riferimento per l’IoT automotive
Una piattaforma IoT automotive robusta non è un’applicazione monolitica. È un sistema distribuito a livelli, progettato per resilienza, scalabilità e sicurezza. Per i leader tecnici, concettualizzare l’architettura in distinti livelli funzionali aiuta a chiarire le responsabilità, identificare potenziali colli di bottiglia e prendere decisioni di progettazione informate. Questo blueprint illustra il flusso dei dati da un sensore a bordo veicolo a un servizio cloud.
L’intero sistema può essere visto come una sofisticata pipeline dati. Assorbe segnali grezzi dal mondo fisico e li raffina in insight che guidano la logica di business, ottimizzano le prestazioni del veicolo o creano nuove esperienze utente. Ogni livello svolge un ruolo critico in questa trasformazione.
I driver di business—Sicurezza, Efficienza e Servizi—forniscono all’architettura tecnica il suo scopo.
Questa relazione è semplice: la connettività è l’abilitatore fondamentale. Tutte le moderne funzionalità automotive si costruiscono su questo livello, creando un collegamento diretto dall’implementazione tecnica ai risultati di business.
Componenti e funzioni architetturali principali
La tabella seguente descrive i livelli essenziali dell’architettura, dall’hardware a bordo veicolo al backend cloud. Una chiara comprensione della funzione di ciascun livello e delle tecnologie associate è fondamentale per progettare una soluzione resiliente e scalabile.
| Livello architetturale | Funzione principale | Tecnologie e protocolli chiave | Considerazioni di implementazione |
|---|---|---|---|
| Sistemi a bordo veicolo | Rileva l’ambiente e lo stato del veicolo; esegue i comandi. | Sensori, ECU, attuatori, bus CAN | Vincoli di elaborazione in tempo reale, durabilità dell’hardware, latenza della comunicazione tra componenti. |
| Gateway del veicolo | Aggrega, filtra e trasmette in modo sicuro i dati fuori dal veicolo. | Unità di controllo telematica (TCU) | Capacità di elaborazione edge, opzioni di connettività (4G/5G), gestione dell’alimentazione, integrità degli aggiornamenti OTA. |
| Connettività | Fornisce il collegamento di comunicazione tra il veicolo e il cloud. | Cellulare (4G/LTE, 5G), DSRC, C-V2X | Latenza, banda, affidabilità della copertura, costo per dispositivo e strategia di failover tra reti. |
| Piattaforma cloud | Ingerisce, archivia, elabora ed espone i dati del veicolo tramite API. | Hub IoT, data lake, API, piattaforme ML | Scalabilità per milioni di dispositivi, sicurezza dei dati e conformità (GDPR, ecc.), multi-tenancy. |
Ogni livello presenta sfide ingegneristiche e compromessi unici. Devono operare in modo coerente per offrire un servizio affidabile e di valore.
Il livello dei sistemi a bordo veicolo
Questo livello è il punto in cui i dati hanno origine. È costituito dalla complessa rete di hardware all’interno del veicolo che rileva, calcola e aziona.
I componenti chiave includono:
- Sensori: Il sistema sensoriale del veicolo, che acquisisce punti dati dalla velocità delle ruote e i giri del motore fino alle coordinate GPS, alla temperatura ambiente e ai flussi video delle telecamere.
- Centraline elettroniche (ECU): Un veicolo moderno può contenerne oltre 100 di questi microcomputer specializzati. Ogni ECU gestisce una funzione specifica, come il controllo del motore, l’ABS o il sistema di infotainment.
- Attuatori: Questi componenti eseguono azioni fisiche in base ai comandi delle ECU, come regolare l’acceleratore, applicare la pressione dei freni o bloccare le portiere.
Un’architettura ingenua potrebbe trattarli come sorgenti dati isolate. Un sistema robusto richiede un metodo unificato per accedere ai loro segnali, tipicamente tramite una rete interna come il Controller Area Network (bus CAN).
Il livello del gateway del veicolo
Il gateway del veicolo, spesso implementato come Telematics Control Unit (TCU), funge da hub centrale per il veicolo connesso. Collega le reti interne del veicolo con il mondo esterno ed è probabilmente il componente hardware più critico in qualsiasi sistema IoT automotive.
Le sue responsabilità principali sono:
- Aggregazione dei dati: La TCU interfaccia varie reti del veicolo (CAN, LIN, FlexRay) per raccogliere dati rilevanti da ECU diverse.
- Filtraggio e pre-elaborazione (edge computing): Trasmettere tutti i dati grezzi dei sensori al cloud è inefficiente e proibitivo in termini di costi. Il gateway esegue l’elaborazione edge—filtra il rumore, comprime i dati ed esegue analisi locali per determinare quali dati siano abbastanza importanti da trasmettere.
- Comunicazione sicura: La TCU agisce come gatekeeper, stabilendo una connessione sicura, autenticata e crittografata al cloud per tutti i dati in ingresso e in uscita.
La scelta di un gateway è una decisione architetturale critica, che comporta un’analisi dei compromessi tra potenza di calcolo, opzioni di connettività (ad es. 4G vs 5G) e consumo energetico.
Il livello di connettività
Questo livello è il mezzo di trasporto dei dati che collega il veicolo alla piattaforma cloud. La scelta della tecnologia influisce direttamente sull’affidabilità del sistema, sulla latenza e sul costo operativo. Non esiste una singola soluzione “migliore”; la scelta ottimale dipende dal caso d’uso.
Le opzioni di connettività più comuni includono:
- Cellulare (4G/LTE, 5G): La scelta predefinita per un’ampia copertura, che fornisce la banda necessaria per telematica, aggiornamenti over-the-air (OTA) e streaming multimediale.
- Dedicated Short-Range Communications (DSRC): Uno standard basato su Wi‑Fi progettato per la comunicazione Vehicle-to-Everything (V2X) a bassa latenza, ideale per applicazioni critiche per la sicurezza come gli avvisi di collisione.
- Cellular V2X (C-V2X): Utilizza le reti cellulari per la comunicazione diretta veicolo-veicolo e veicolo-infrastruttura, offrendo un’alternativa al DSRC con una portata potenzialmente maggiore.
Un sistema resiliente spesso adotta un approccio ibrido, con logica nel gateway per passare da una tecnologia all’altra in base alla disponibilità, al costo e ai requisiti specifici dei dati trasmessi.
Il livello della piattaforma cloud
I dati trasmessi dal veicolo vengono acquisiti ed elaborati dalla piattaforma cloud. Questa infrastruttura backend deve essere progettata per una scala enorme, alta disponibilità e sicurezza rigorosa. Per i team che stanno valutando le opzioni, la nostra guida su cloud computing versus soluzioni on-premise illustra i relativi compromessi.
Una tipica piattaforma cloud per l’IoT automotive include:
- Acquisizione dei dati: Un punto di ingresso altamente scalabile, come un broker di messaggi IoT, in grado di gestire flussi di dati concorrenti da milioni di veicoli senza degradare le prestazioni.
- Archiviazione ed elaborazione: Una combinazione di database e data lake per la conservazione della telemetria grezza, affiancata da motori di elaborazione dati per analytics e addestramento di modelli di machine learning.
- Servizi applicativi: API che espongono dati e funzionalità del veicolo ad altre applicazioni, come una dashboard di fleet management, un’app mobile per utenti finali o l’integrazione con un partner terzo.
La scala di mercato è significativa. Solo il mercato Asia Pacific dell’internet of things automotive ha detenuto una quota globale del 40,78% nel 2025. Con proiezioni che indicano una crescita da 37,20 miliardi di USD nel 2026 a 91,69 miliardi di USD entro il 2034, la necessità di un’architettura cloud scalabile è evidente.
Una piattaforma cloud ben progettata è più di un repository di dati; è un motore di innovazione. Consente lo sviluppo e il deployment remoto di nuove funzionalità e servizi, garantendo che la piattaforma rimanga preziosa per l’intero ciclo di vita del veicolo.
Casi d’uso reali e pattern di implementazione
Una buona architettura è un prerequisito, ma il suo valore si realizza attraverso l’implementazione di soluzioni di business specifiche e ad alto impatto. È qui che la teoria si traduce in pratica, dimostrando come il framework internet of things automotive trasformi i dati grezzi in servizi tangibili. Ciò richiede più della raccolta dati; richiede l’applicazione di pattern software collaudati per costruire applicazioni affidabili.
Di seguito sono riportati tre casi d’uso critici che illustrano questa trasformazione. Ognuno affronta un problema di business distinto, utilizza una combinazione unica di dati ed è costruito usando pattern di implementazione consolidati.
Manutenzione predittiva per massimizzare l’uptime
Il problema di business principale è l’elevato costo dei fermi veicolo imprevisti. Per una flotta commerciale, un veicolo fuori servizio si traduce direttamente in perdita di ricavi e disservizi logistici. Il tradizionale modello di manutenzione “break-fix” è inefficiente e costoso.
La soluzione consiste nell’utilizzare i dati del veicolo per prevedere i guasti dei componenti prima che si verifichino. Questo trasforma i tempi di inattività non pianificati in appuntamenti di assistenza programmati ed efficienti. In alcune applicazioni di smart city, è stato dimostrato che questi guadagni di efficienza riducono i tempi di attesa dei veicoli agli incroci fino al 40%.
Il sistema deve elaborare diversi flussi di dati chiave:
- Telemetria CAN Bus: temperatura del motore, pressione dell’olio, RPM e codici diagnostici di guasto (DTC) sono input fondamentali.
- Letture dei sensori: i sensori di vibrazione su componenti specifici o i monitor della tensione della batteria forniscono indicatori granulari dello stato di salute.
- Dati di utilizzo: le letture del contachilometri e le ore motore forniscono un contesto essenziale per modellare l’usura dei componenti.
Il pattern software sottostante è l’analisi delle serie temporali. I dati vengono ingeriti nel cloud, dove i modelli di machine learning vengono addestrati per identificare i sottili pattern che precedono un guasto. Quando il modello rileva un’anomalia nel flusso di dati di un veicolo in tempo reale, genera un avviso per il fleet manager.
Gestione della flotta per la visibilità operativa
La sfida principale per qualsiasi operatore di flotta—dai servizi di consegna al trasporto su lunga distanza—è spesso la mancanza di visibilità e controllo operativi in tempo reale. Questa opacità porta a instradamenti inefficienti, uso non autorizzato dei veicoli, pratiche di guida non sicure e spreco di carburante.
Un moderno sistema di fleet management fornisce un centro di comando centralizzato, offrendo ai manager un quadro operativo completo per tracciare gli asset, ottimizzare la logistica e applicare i protocolli di sicurezza.
Questo caso d’uso si basa su una combinazione di dati in tempo reale e storici:
- Dati GPS: forniscono la posizione, la velocità e la direzione del veicolo in tempo reale.
- Dati di accelerometro e giroscopio: essenziali per rilevare frenate brusche, accelerazioni rapide e curve strette—tutti indicatori di comportamento di guida rischioso.
- Sensori del livello carburante: i dati provenienti dal CAN bus aiutano a monitorare il consumo di carburante e a rilevare potenziali furti.
L’implementazione in genere prevede una dashboard in tempo reale alimentata da API che servono i dati elaborati del veicolo. I principali pattern software includono il geofencing (attivazione di avvisi quando un veicolo entra o esce da un confine virtuale predefinito) e l’analisi del comportamento del conducente, che genera punteggi di sicurezza.
Una piattaforma di fleet management non serve solo a tracciare le posizioni su una mappa. È un sistema di record che traduce la telemetria grezza in intelligence operativa azionabile, consentendo decisioni basate sui dati su instradamento, formazione dei conducenti e utilizzo degli asset.
Vehicle-to-Everything (V2X) per la sicurezza cooperativa
Il problema fondamentale che la comunicazione V2X risolve è il limite intrinseco dei sensori di bordo di un veicolo. Le telecamere, il radar e il lidar di un’auto sono limitati alla loro linea di vista diretta. Non possono percepire pericoli dietro curve cieche, attraverso una fitta nebbia o rilevare un veicolo che frena bruscamente diverse auto più avanti.
La tecnologia V2X estende la consapevolezza situazionale di un veicolo consentendo la comunicazione diretta con altri veicoli (V2V), con infrastrutture come i semafori (V2I) e persino con i pedoni (V2P). Questo crea una rete di sicurezza cooperativa in cui i veicoli possono trasmettere e ricevere avvisi sui pericoli molto prima che un conducente o un sensore di bordo possano rilevarli.
Gli input dati per V2X sono altamente dinamici e sensibili al tempo:
- Basic Safety Messages (BSM): posizione, velocità, accelerazione e stato di frenata di un veicolo vengono trasmessi più volte al secondo.
- Dati infrastrutturali: le informazioni di Signal Phase and Timing (SPaT) dei semafori consentono a un veicolo di anticipare un cambio di segnale.
- Avvisi di pericolo: messaggi basati su eventi, come un avviso di strada scivolosa trasmesso da un veicolo che ha appena rilevato uno slittamento delle ruote.
Il pattern di implementazione per V2X richiede protocolli di comunicazione a bassa latenza come DSRC o C-V2X. Il software deve elaborare i messaggi in arrivo quasi in tempo reale per prendere decisioni immediate, come avvisare il conducente di una potenziale collisione. Questo è un esempio classico in cui l’edge computing è imprescindibile; affidarsi al cloud introdurrebbe una latenza inaccettabile per funzioni critiche per la sicurezza.
Integrazione di AI e Machine Learning
La raccolta dei dati è solo il primo passo. Il vero valore si sblocca quando quei dati vengono usati per prevedere, decidere e agire. Questo è il dominio dell’Intelligenza Artificiale (AI) e del Machine Learning (ML), che trasformano un veicolo da hub di sensori passivo in un sistema intelligente e predittivo.
Non si tratta di un esercizio di marketing. Si tratta di cambiare in modo fondamentale il funzionamento del veicolo, la manutenzione e l’esperienza utente. Per i leader tecnici, la sfida non è semplicemente selezionare un algoritmo, ma progettare un sistema in grado di gestire efficacemente i carichi di lavoro AI.
Una decisione architetturale critica è dove elaborare i dati: direttamente sul veicolo (Edge AI) o nel cloud (Cloud-based ML). Ogni approccio risolve una classe diversa di problemi. Un sistema robusto non sceglie l’uno al posto dell’altro; li orchestra entrambi.
Il compromesso tra Edge AI e Cloud ML
La decisione su dove eseguire un modello AI è una scelta architetturale fondamentale, guidata da un’analisi del compromesso tra latenza, costi e complessità. Nessuno dei due è una soluzione universale.
Il principio centrale è semplice: usare l’Edge AI per l’immediatezza e il Cloud ML per la profondità. Le azioni in tempo reale che influenzano l’esperienza di guida immediata appartengono all’edge. Le analisi complesse a livello di flotta appartengono al cloud.
Edge AI per decisioni in tempo reale
Edge AI consiste nell’eseguire modelli ML leggeri direttamente sull’hardware del veicolo, come un gateway o una ECU dedicata. Il vantaggio principale è la bassa latenza. Quando una decisione deve essere presa in millisecondi, un andata e ritorno al cloud non è praticabile.
Le applicazioni Edge AI includono:
- Sistemi di monitoraggio del conducente (DMS): una telecamera in cabina alimenta un modello edge che rileva segni di stanchezza o distrazione del conducente. Il sistema genera un avviso istantaneamente senza consultare il cloud.
- Avvisi di pericolo imminente: un modello che elabora i dati locali dei sensori (radar, lidar) può identificare un ostacolo improvviso, predisponendo il sistema frenante frazioni di secondo prima del tempo di reazione umano.
- Cruise control adattivo: i modelli edge regolano continuamente la velocità del veicolo in base al flusso di traffico immediato, operando in modo affidabile senza una connessione internet persistente.
Il vincolo principale è la potenza di elaborazione finita dell’hardware di bordo. I modelli edge devono essere snelli e altamente ottimizzati, il che a volte può comportare un compromesso in termini di accuratezza rispetto alle controparti più grandi basate sul cloud.
Cloud-based ML per l’intelligenza a livello di flotta
Il cloud fornisce la potenza computazionale per analisi su larga scala. Consente l’addestramento di modelli complessi su dati aggregati provenienti da migliaia o milioni di veicoli, scoprendo insight invisibili dal punto di vista di un singolo veicolo.
I casi d’uso comuni per il Cloud-based ML includono:
- Manutenzione predittiva: analizzando la telemetria dell’intera flotta, i modelli cloud possono identificare i segnali deboli che prevedono il guasto di un componente specifico. Questo modello può quindi essere utilizzato per generare avvisi per veicoli singoli o fleet manager.
- Ottimizzazione dei percorsi: un modello può elaborare dati storici sul traffico, modelli meteorologici ed eventi in tempo reale provenienti da migliaia di veicoli per calcolare i percorsi più efficienti per un’intera flotta logistica.
- Modellazione del rischio assicurativo: le compagnie assicurative utilizzano dati aggregati sul comportamento di guida—come frenate brusche e eventi di accelerazione—provenienti da un ampio bacino di conducenti per costruire profili di rischio più accurati.
Il vincolo principale è la connettività. Le funzioni dipendenti dal cloud non sono disponibili se un veicolo è offline, rendendo questo approccio inadatto ad applicazioni in tempo reale e critiche per la sicurezza. Una strategia chiara è essenziale quando si progettano questi sistemi. Per un’analisi più approfondita, consulta la nostra guida su come strutturare il tuo progetto AI per il successo.
Orchestrazione e controlli Human-in-the-Loop (HITL)
Un sistema IoT automotive maturo orchestra sia i modelli edge sia quelli cloud. Ad esempio, un modello edge potrebbe rilevare una vibrazione insolita del motore. Invece di generare un avviso generico, potrebbe trasmettere al cloud un “istantanea dell’evento” compressa. Un modello cloud più potente potrebbe quindi analizzare l’intera cronologia di manutenzione del veicolo per confermare se l’evento corrisponde a uno schema di guasto noto.
Questa orchestrazione richiede API robuste e, aspetto fondamentale, supervisione umana. Un processo human-in-the-loop (HITL) è essenziale per governance e sicurezza. Ad esempio, quando un modello cloud segnala un veicolo per manutenzione critica, la decisione finale di programmare l’intervento dovrebbe essere convalidata da un esperto umano. Questo aggiunge un livello cruciale di responsabilità, garantendo che i sistemi automatizzati operino entro limiti sicuri e prevedibili.
Navigare sicurezza, privacy e conformità
Nel dominio dell’internet of things automotive, sicurezza e privacy non sono funzionalità; sono requisiti architetturali fondamentali. Un approccio superficiale che tratta la sicurezza come una checklist porterà inevitabilmente a violazioni, sanzioni normative e a una perdita catastrofica della fiducia dei clienti. Costruire sistemi resilienti e affidabili richiede una metodologia security-first fin dalla fase di progettazione iniziale.
Il panorama delle minacce è ampio e complesso, e comprende attacchi fisici, di rete e a livello software. Un modello di minaccia completo non è negoziabile.
Il panorama delle minacce automotive
I leader tecnici e della conformità devono prepararsi a una gamma di rischi specifici per i veicoli connessi. Non si tratta di problemi teorici, ma di vettori di attacco attivi che richiedono strategie di mitigazione robuste.
Le minacce principali includono:
- Attacchi al bus del veicolo: l’accesso non autorizzato al Controller Area Network (CAN) interno consente a un aggressore di inviare comandi falsificati, potenzialmente controllando funzioni critiche come frenata o sterzo.
- Intercettazione dei dati: attacchi man-in-the-middle sul collegamento di comunicazione veicolo-cloud possono esporre telemetria sensibile, dati personali o credenziali di autenticazione.
- Violazioni della piattaforma cloud: un backend cloud compromesso può concedere agli aggressori l’accesso ai dati di un’intera flotta, abilitando il tracciamento di massa dei veicoli o l’esfiltrazione dei dati.
- Aggiornamenti Over-the-Air (OTA) insicuri: un meccanismo di aggiornamento OTA compromesso potrebbe essere utilizzato per distribuire firmware dannoso a migliaia di veicoli simultaneamente, creando un incidente diffuso di sicurezza o di safety.
Questo panorama è particolarmente critico nei mercati regolamentati. Ad esempio, il mercato automotive IoT europeo ha detenuto una quota globale del 24% nel 2023, trainato in gran parte da rigorose normative sulla sicurezza dei veicoli. La domanda di telematica sicura sta alimentando un CAGR previsto del 14,8% nel segmento dei servizi dal 2024 al 2030. Maggiori dettagli su queste tendenze sono disponibili nel rapporto completo di Grand View Research.
Un framework per la mitigazione
Affrontare queste minacce richiede una strategia stratificata, di difesa in profondità, fondata sul principio di Privacy by Design. Ciò significa che le considerazioni sulla sicurezza e sulla privacy devono guidare ogni decisione architetturale. La nostra guida su implementare i principi della Privacy by Design offre un approfondimento più dettagliato di questa filosofia.
La privacy non è una funzionalità aggiunta alla fine di un progetto. È una scelta architetturale che determina come i dati vengono raccolti, elaborati e protetti lungo l’intero ciclo di vita. Non integrarla fin dal primo giorno crea un rischio sistemico.
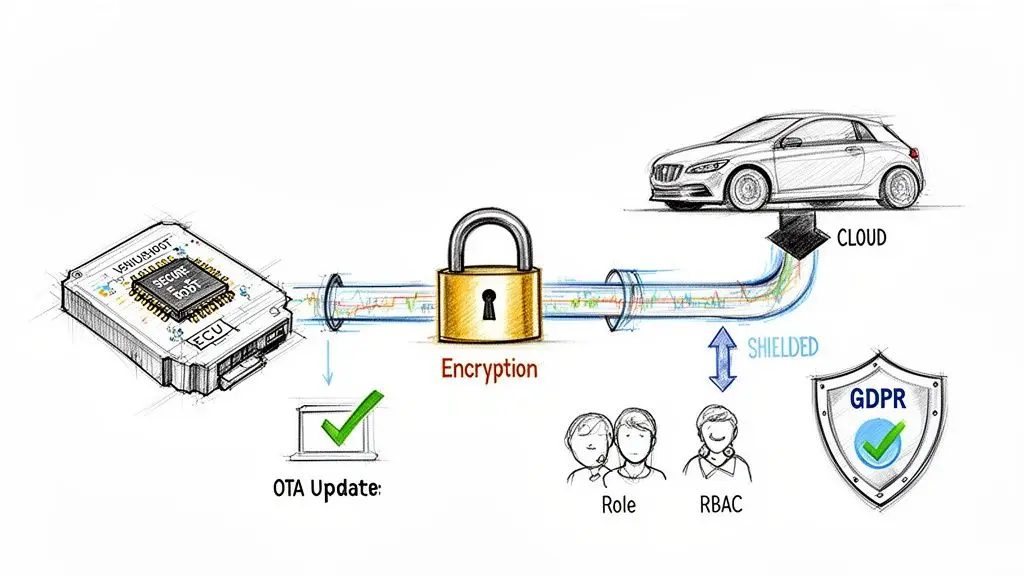
Le principali strategie di mitigazione includono:
- Crittografia end-to-end: Tutti i dati trasmessi dal veicolo devono essere crittografati in transito (ad es. tramite TLS) e a riposo all’interno dell’infrastruttura cloud per prevenire intercettazioni e accessi non autorizzati.
- Processi di Secure Boot: Il gateway del veicolo e le ECU critiche devono implementare un bootloader sicuro che verifichi crittograficamente la firma del firmware prima dell’esecuzione, impedendo l’esecuzione di codice non autorizzato.
- Controllo degli accessi basato sui ruoli (RBAC): All’interno della piattaforma cloud, l’accesso ai dati sensibili del veicolo deve essere rigorosamente controllato in base al ruolo dell’utente, garantendo che un account compromesso con privilegi bassi non possa accedere ai sistemi critici.
- Meccanismi OTA sicuri: Gli aggiornamenti OTA devono essere firmati crittograficamente e il veicolo deve verificare questa firma prima di applicare qualsiasi aggiornamento, garantendo l’integrità e l’autenticità del firmware.
Orientarsi nel panorama normativo
La conformità non è opzionale. Regolamenti come il Regolamento generale sulla protezione dei dati (GDPR) impongono regole rigorose sulla gestione dei dati personali, inclusi posizione e comportamento di guida. Direttive più recenti come NIS2 stanno ampliando gli obblighi di cybersecurity per le infrastrutture critiche, che possono comprendere grandi flotte di veicoli.
Per i responsabili della conformità e i CTO, ciò significa che ogni flusso di dati deve essere mappato, ogni attività di trattamento deve avere una base giuridica definita e devono essere dimostrabilmente in atto misure di sicurezza robuste. Il mancato rispetto delle norme può comportare gravi sanzioni finanziarie e danni reputazionali che superano di gran lunga l’investimento iniziale nella costruzione di un sistema sicuro e conforme.
Conclusione: punti chiave per i leader tecnici
Per fondatori, CTO e leader di prodotto nel settore automotive, una strategia IoT di successo si basa su tre principi fondamentali.
Per prima cosa, implementare un’architettura pragmatica e scalabile. Ciò richiede di compiere scelte ponderate tra elaborazione edge e cloud e di costruire pipeline dati progettate per connettività intermittente e volumi enormi di dati. Dare priorità a sistemi manutenibili nel lungo periodo.
In secondo luogo, riconoscere che sicurezza e privacy sono decisioni architetturali, non funzionalità. Un approccio alla conformità come semplice checklist non è sufficiente. Integrare crittografia end-to-end, aggiornamenti OTA sicuri e controlli di accesso robusti fin dall’inizio del progetto per costruire una piattaforma affidabile.
Infine, assicurarsi che ogni decisione tecnica abbia una chiara relazione con il valore di business. Che si tratti di ottimizzare la logistica della flotta o di sviluppare un nuovo servizio in abbonamento, l’obiettivo è trasformare i dati del veicolo in un risultato misurabile. La vera innovazione in questo settore si fonda su una base di ingegneria solida, creando sistemi affidabili, conformi e in grado di offrire un valore tangibile.
Domande frequenti
Quali sono le principali sfide architetturali nell’IoT automotive?
Le tre sfide più comuni sono la gestione della connettività intermittente, la garanzia della sicurezza end-to-end dei dati e la gestione dell’enorme volume di dati dei sensori. Un’architettura robusta deve essere progettata per funzionare durante i periodi offline, implementare una forte crittografia dal veicolo al cloud e utilizzare pipeline dati in grado di scalare efficacemente.
Un compromesso critico è l’equilibrio tra elaborazione edge e cloud. Questa decisione comporta una negoziazione costante tra latenza, costo e capacità di elaborazione. Una strategia mal progettata può portare a costi eccessivi di trasferimento dati o a un sistema con una latenza inaccettabile per il caso d’uso previsto.
Come garantire privacy e sicurezza dei dati nei veicoli connessi?
Una strategia di difesa in profondità è essenziale. Si parte all’interno del veicolo con una radice di fiducia hardware, come un Hardware Security Module (HSM), che protegge tutte le operazioni crittografiche.
Da lì, sono necessari canali di comunicazione crittografati (ad es. TLS) e una piattaforma cloud sicura con controlli di accesso rigorosi. Soprattutto, l’intero sistema deve essere costruito con una metodologia privacy by design. Ciò significa che principi come la minimizzazione dei dati e l’anonimizzazione sono elementi integranti dell’architettura, non riflessioni successive.
La sicurezza non è una funzionalità aggiunta alla fine di un progetto. È una scelta architetturale che determina come i dati vengono raccolti, elaborati e protetti lungo l’intero ciclo di vita.
Audit di sicurezza regolari e un meccanismo affidabile di aggiornamento Over-the-Air (OTA) sono inoltre imprescindibili per mantenere l’integrità del sistema nel tempo.
Qual è la differenza tra elaborazione edge e cloud in ambito automotive?
L’elaborazione edge avviene direttamente sull’hardware di bordo del veicolo, come la Telematics Control Unit (TCU). È ideale per decisioni che richiedono una latenza dell’ordine dei millisecondi e in cui non si può garantire una connessione Internet stabile, come un avviso di collisione o un sistema di monitoraggio dell’attenzione del conducente.
L’elaborazione cloud prevede la trasmissione dei dati a server remoti per attività computazionalmente intensive. Questo viene utilizzato per addestrare modelli complessi di machine learning sui dati dell’intera flotta o per eseguire analisi approfondite sulle tendenze storiche. La scelta tra i due dipende dal tempo di risposta richiesto, dall’affidabilità della connettività e dalle risorse computazionali necessarie per il compito.
Come può un’azienda avviare un progetto pilota per la telematica di flotta?
Iniziare con un obiettivo mirato e semplice. Lo scopo di un pilot è validare il concetto, non costruire il prodotto finale. Partire con un piccolo numero di veicoli e uno o due metriche chiave, come il tracciamento GPS in tempo reale e i dati di consumo carburante dal bus CAN.
Utilizzare dispositivi telematici commerciali per accelerare il deployment e minimizzare i costi iniziali. Gli obiettivi principali sono validare il business case, testare la pipeline dati e definire i requisiti essenziali per le dashboard operative. Questo approccio iterativo riduce al minimo il rischio e aiuta a costruire una solida giustificazione per un rollout su larga scala.
In Devisia, siamo specializzati nel trasformare visioni di business complesse in prodotti digitali affidabili e sistemi abilitati all’AI. Realizziamo software scalabile, sicuro e manutenibile con un focus sul valore di business misurabile. Per discutere di come possiamo aiutarvi a costruire la vostra prossima piattaforma IoT automotive o modernizzarne una esistente, visitateci su https://www.devisia.pro.