Un Sistema Avanzato di Assistenza alla Guida (ADAS) non è una singola tecnologia, ma un complesso insieme di funzioni progettate per migliorare la sicurezza del veicolo e ridurre il carico di lavoro del conducente. Questi sistemi operano come un copilota digitale, utilizzando sensori come telecamere e radar per monitorare l’ambiente del veicolo e compensare i ritardi di frazione di secondo nella reazione umana da cui originano la maggior parte degli incidenti.
Il loro scopo non è sostituire il conducente, ma assisterlo. Questa distinzione è fondamentale per definire l’ambito del prodotto, gestire la responsabilità e prendere decisioni ingegneristiche solide.
Scomporre Il Sistema Avanzato di Assistenza alla Guida
Per un leader tecnico, un ADAS deve essere compreso come un sistema profondamente integrato di sensori, processori e software che interpreta in tempo reale l’ambiente circostante del veicolo. L’obiettivo è fornire un ulteriore livello di consapevolezza e ridurre il carico cognitivo sul conducente.
Il problema ingegneristico fondamentale è colmare il divario tra la percezione umana e la fisica di un veicolo in movimento. Ciò implica la costruzione di una rete di sicurezza robusta, non il raggiungimento della piena autonomia: un confine cruciale per definire obiettivi di prodotto realistici e gestire i compromessi tecnici.
Categorie Funzionali Principali
Per strutturare lo sviluppo e allineare le esigenze di mercato con i vincoli normativi, le funzioni ADAS possono essere classificate in tre categorie principali.
- Funzioni di Sicurezza: Queste funzionalità sono progettate per prevenire o mitigare le collisioni. Esempi includono Frenata Automatica di Emergenza (AEB), che aziona i freni per evitare un impatto imminente, e il Rilevamento dell’Angolo Cieco, che avvisa il conducente della presenza di veicoli non visibili.
- Funzioni di Comfort e Convenienza: Questi sistemi mirano a ridurre lo sforzo del conducente, in particolare durante i viaggi a lunga distanza o nel traffico intenso. Cruise Control Adattivo (ACC), che mantiene una distanza prestabilita dal veicolo che precede, e Assistenza al Mantenimento della Corsia (LKA) sono esempi rilevanti.
- Funzioni di Automazione: Queste funzionalità assumono compiti di guida specifici in condizioni operative ben definite. Traffic Jam Assist, ad esempio, può gestire sterzata, frenata e accelerazione in ambienti congestionati a bassa velocità.
L’adozione sul mercato riflette il valore di questi sistemi. Entro il 2026, funzionalità come l’avviso di collisione frontale e la frenata automatica di emergenza avranno superato il 90% di penetrazione di mercato nei nuovi veicoli, trasformando l’ADAS da opzione di lusso a componente standard del veicolo definito dal software.
Alla sua base, un ADAS è un esercizio di mitigazione del rischio applicata. Il sistema calcola continuamente la probabilità di eventi avversi — una collisione, una deviazione di corsia — e agisce per ridurre tale rischio. La sua efficacia non è determinata da un singolo algoritmo, ma dall’affidabilità dell’intera catena hardware e software.
Questa rapida integrazione è un aspetto chiave dell’Internet delle Cose nel settore automotive, dove i sistemi connessi sono ormai parte integrante della funzionalità e della sicurezza del veicolo.
Livelli SAE di Automazione della Guida
Per fornire un linguaggio comune sulle capacità di automazione, il settore si basa sullo standard SAE J3016, che definisce sei livelli di automazione della guida. Questo quadro chiarisce la divisione delle responsabilità tra il sistema e il conducente umano.
Per ingegneri e responsabili di prodotto, questi livelli non sono semplici etichette; rappresentano soglie architetturali, di validazione e di responsabilità distinte.
Livelli SAE Di Automazione Della Guida In Sintesi
| Livello SAE | Responsabilità del sistema | Responsabilità del conducente |
|---|---|---|
| Livello 0 | Fornisce solo avvisi (es. avviso di collisione frontale). | Guida, sterza, frena e accelera in ogni momento. |
| Livello 1 | Fornisce controllo dello sterzo oppure della velocità (es. cruise control adattivo). | Supervisiona il sistema ed esegue tutte le altre attività di guida. |
| Livello 2 | Fornisce sia il controllo dello sterzo sia della velocità (es. centraggio di corsia + ACC). | Deve rimanere coinvolto, monitorare l’ambiente ed essere pronto a riprendere il controllo. |
| Livello 3 | Gestisce tutte le attività di guida in condizioni specifiche e limitate. | Può disimpegnarsi ma deve essere pronto a riprendere il controllo quando richiesto. |
| Livello 4 | Gestisce tutte le attività di guida all’interno di un’area operativa definita (geofenced). | Può disimpegnarsi completamente; non è previsto che riprenda il controllo all’interno dell’area. |
| Livello 5 | Gestisce tutte le attività di guida su tutte le strade e in tutte le condizioni. | Diventa un passeggero. Non è necessario alcun conducente. |
La stragrande maggioranza delle funzionalità ADAS oggi implementate opera ai Livelli 1 e 2. Il passaggio al Livello 3 rappresenta un ostacolo tecnico e legale significativo, poiché segna il primo punto in cui il sistema, e non il conducente, è responsabile del monitoraggio dell’ambiente di guida.
Un sistema avanzato di assistenza alla guida è un ecosistema complesso di hardware e software. Per i team di prodotto e ingegneria, comprendere i componenti e i relativi compromessi è il primo passo per costruire un sistema non solo efficace, ma anche commercialmente sostenibile e sicuro.
Tutto inizia dalla suite di sensori, che funge da interfaccia sensoriale del veicolo con il mondo.
Scegliere la giusta combinazione di sensori è una decisione architetturale ad alto rischio, che bilancia costo, prestazioni e affidabilità in tutte le possibili condizioni operative. Ogni tipo di sensore ha punti di forza e debolezze intrinseci, rendendo la ridondanza un requisito fondamentale di progettazione, non un optional. Una suite di sensori progettata male introduce rischi sistemici inaccettabili.
Il Livello Di Input Sensoriale
Un ADAS moderno costruisce il proprio modello ambientale fondendo dati provenienti da un insieme eterogeneo di sensori. Nessun singolo sensore può fornire un quadro completo e affidabile, soprattutto in condizioni meteorologiche avverse o in ambienti urbani complessi.
-
Telecamere: In quanto sensori visivi primari, le telecamere sono eccellenti per il riconoscimento dei colori, la lettura dei segnali stradali e l’identificazione delle marcature di corsia. Il loro principale limite è il degrado delle prestazioni in condizioni di scarsa illuminazione, forti precipitazioni o abbagliamento diretto. Forniscono ricchi dati 2D, fondamentali per la classificazione degli oggetti.
-
Radar: Utilizzando onde radio, il radar è una soluzione robusta per misurare la distanza e la velocità relativa degli oggetti, anche in condizioni atmosferiche che compromettono le telecamere. È il cavallo di battaglia di funzioni come il Cruise Control Adattivo (ACC) e l’Avviso di Collisione Frontale. Il suo principale compromesso è la risoluzione inferiore, che rende difficile classificare il tipo di oggetto rilevato.
-
LiDAR (Light Detection and Ranging): Il LiDAR costruisce una nuvola di punti 3D ad alta precisione dell’ambiente emettendo impulsi laser. Ciò offre una capacità senza pari di rilevare oggetti e discernerne la forma. Sebbene le sue prestazioni siano eccellenti, nebbia fitta, neve o pioggia possono causare diffusione e attenuazione. Storicamente, è stato anche un componente più costoso.
-
Ultrasuoni: Si tratta di sensori semplici e a basso costo utilizzati per applicazioni a bassa velocità e a corto raggio come l’assistenza al parcheggio e il monitoraggio dell’angolo cieco. Sono efficaci per il rilevamento di prossimità ma hanno un raggio operativo molto limitato.
La prospettiva incentrata sui sensori ha importanti implicazioni di mercato. Si prevede che il mercato globale ADAS varrà oltre 40 miliardi di USD entro il 2026, con i sensori che ne rappresentano una quota significativa. Tuttavia, il vero fattore distintivo si sta sempre più spostando verso il software. I miglioramenti guidati dall’IA nell’elaborazione dei dati in tempo reale possono potenziare le capacità del sistema, riducendo talvolta la dipendenza dall’hardware più costoso. Per i responsabili di prodotto, questo segnala una priorità strategica: software e IA sono gli asset difendibili. Puoi approfondire queste dinamiche di mercato e tendenze dei sensori per uno sguardo più dettagliato.
Il Livello Software Di Percezione E Fusione
I dati grezzi dei sensori sono un flusso di rumore non strutturato. Il compito ingegneristico critico del livello di percezione è elaborare questi dati e costruire un modello coerente e utilizzabile dell’ambiente del veicolo. È qui che la fusione dei sensori è fondamentale.
La fusione dei sensori è il processo di combinazione dei dati provenienti da più sensori per generare una comprensione più accurata e robusta di quella che qualsiasi singolo sensore potrebbe ottenere da solo. Ad esempio, una telecamera può identificare un oggetto come un pedone, mentre un radar ne conferma simultaneamente la distanza e la velocità precise. Uniti insieme, creano una valutazione ad alta affidabilità sulla quale il sistema può agire.
La fusione dei sensori non riguarda solo la sovrapposizione dei dati; riguarda la progettazione per la resilienza. Quando un sensore è compromesso — una telecamera accecata dal riverbero del sole — il sistema deve affidarsi in modo fluido ad altri input, come il radar, per mantenere uno stato operativo sicuro. Questo è un principio fondamentale della progettazione della sicurezza funzionale.
Quando progettano il sistema di fusione, i team devono affrontare una scelta architetturale critica:
-
Fusione Precoce (o Accoppiamento Stretto): Questo approccio combina dati grezzi e di basso livello provenienti da sensori diversi all’inizio della pipeline di elaborazione. Alimentando questo flusso di dati unificato in un unico algoritmo complesso, è possibile rilevare caratteristiche che potrebbero sfuggire elaborando i dati dei sensori in modo indipendente. Il compromesso è una complessità significativa e un forte accoppiamento tra i sensori e l’algoritmo di fusione, che rendono il sistema più difficile da testare e mantenere.
-
Fusione Tardiva (o Accoppiamento Debole): Questo è l’approccio più comune e modulare. I dati di ciascun sensore vengono elaborati in modo indipendente per generare elenchi di oggetti di alto livello (es. “la telecamera rileva un’auto a 50 m”, “il radar rileva un oggetto a 51 m”). Questi elenchi vengono poi combinati (“fusi”) in una fase successiva. Sebbene potenzialmente meno sfumata della fusione precoce, questa architettura è molto più semplice da costruire, testare, scalare e mantenere, consentendo lo sviluppo indipendente di ciascuno stack di sensori.
La scelta tra fusione precoce e tardiva ha implicazioni profonde per l’architettura del sistema, la velocità di sviluppo e la strategia di validazione. Per la maggior parte dei team, una strategia di fusione tardiva offre un percorso più pragmatico per fornire valore in modo incrementale garantendo al tempo stesso la manutenibilità a lungo termine.
Il Ruolo Dell’IA E Del Machine Learning Nell’ADAS
Con un modello ambientale fuso, entra in gioco l’intelligenza centrale del sistema — guidata da Intelligenza Artificiale (IA) e Machine Learning (ML). Questi modelli sono responsabili della trasformazione di un flusso di dati dei sensori in informazioni predittive e, in ultima analisi, in decisioni di guida.
Per un leader ingegneristico, la sfida non è solo teorica. Implica la comprensione dei compromessi pratici necessari per distribuire questi modelli in modo affidabile su hardware di grado automotive con risorse e consumo energetico limitati.
Il processo decisionale dell’ADAS convoglia gli input grezzi dei sensori attraverso un modello di percezione, che cerca di costruire una comprensione completa dell’ambiente.
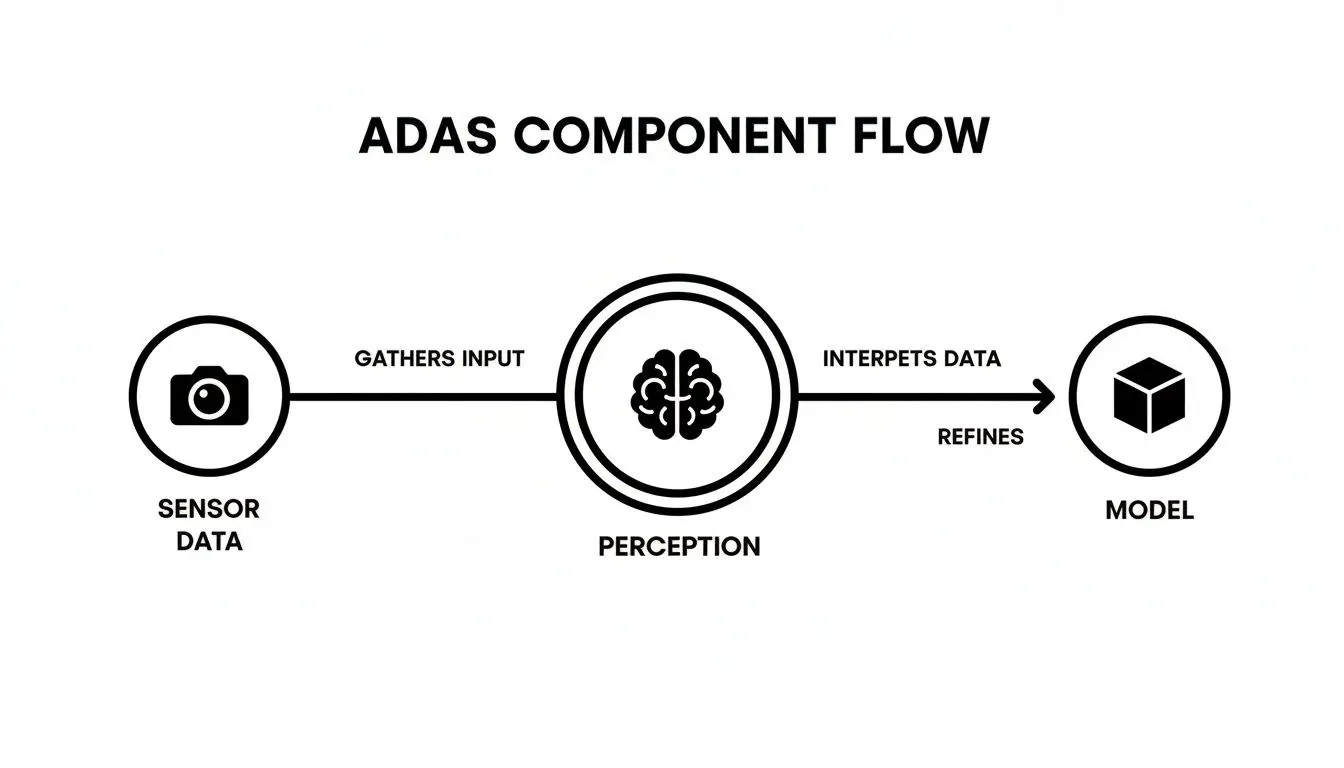
Questa pipeline — dai dati grezzi alla percezione fino all’interpretazione di un modello IA — è il fondamento di ogni azione compiuta dal sistema.
Dalla Rilevazione Degli Oggetti Alla Comprensione Della Scena
I modelli IA più utilizzati in molte piattaforme ADAS oggi sono le Reti Neurali Convoluzionali (CNN). Una CNN è un modello specializzato di riconoscimento dei pattern, addestrato a rilevare e classificare oggetti come veicoli, pedoni e segnali stradali dalle immagini delle telecamere. Eccelle nel rispondere alla domanda: “Quali oggetti sono presenti in questa scena?”
Tuttavia, identificare gli oggetti non è sufficiente per una navigazione sicura. Un ADAS robusto deve anche comprendere il contesto. Questo requisito sta spingendo il settore verso architetture più sofisticate come i Vision Transformer (ViT). A differenza di una CNN che elabora un’immagine in patch localizzate, un Transformer può valutare l’intera scena in modo olistico. Questo meccanismo di attenzione globale gli consente di modellare le relazioni tra gli oggetti, fornendo una comprensione più completa della situazione—un analogo di come un guidatore umano percepisce un ambiente stradale dinamico.
Il passaggio dalle CNN ai Transformer rappresenta uno spostamento dal semplice riconoscimento degli oggetti alla vera comprensione della scena. È la differenza tra identificare una palla e prevedere che un bambino possa correre in strada dietro di essa. Questa capacità predittiva è ciò che eleva un ADAS da sistema di allerta reattivo a partner di sicurezza proattivo.
La realtà ingegneristica della distribuzione di Edge AI
Sviluppare un modello AI ad alte prestazioni è una sfida; distribuirlo in modo affidabile all’interno di un veicolo in movimento è tutt’altro problema. I sistemi automobilistici sono ambienti fortemente vincolati e il ruolo del responsabile tecnico è bilanciare le prestazioni del modello con i limiti fisici dell’hardware.
I principali vincoli di distribuzione includono:
- Latenza: le decisioni dell’ADAS devono essere prese in millisecondi. Qualsiasi ritardo nell’inferenza del modello—il tempo necessario per elaborare i dati in tempo reale—può avere conseguenze catastrofiche. Ciò rende necessario che tutto l’elaborazione critica per la sicurezza avvenga sull’hardware edge del veicolo, poiché la latenza di un andata e ritorno verso il cloud è inaccettabile.
- Consumo energetico: il sistema elettrico di un veicolo dispone di un budget di potenza finito. L’elaborazione AI ad alta intensità computazionale consuma energia significativa, con un impatto diretto sull’autonomia di un EV o sull’efficienza di un veicolo convenzionale. L’efficienza del modello è un requisito ingegneristico imprescindibile.
- Dimensione del modello e quantizzazione: i modelli grandi e ad alte prestazioni addestrati nei data center sono spesso troppo voluminosi per i processori specializzati ed экономici utilizzati nei veicoli. Ciò richiede tecniche come la quantizzazione, che riduce la precisione numerica dei pesi del modello (ad esempio, da virgola mobile a 32 bit a interi a 8 bit) per ridurne l’ingombro e accelerare l’inferenza. Il compromesso è una possibile perdita di accuratezza che deve essere rigorosamente quantificata e validata.
Distribuire l’AI in un contesto automobilistico è un esercizio di ottimizzazione senza compromessi. Richiede una comprensione profonda e pratica di come le prestazioni software siano legate ai vincoli hardware, per garantire che l’intelligenza del sistema non sia solo potente, ma anche efficiente e affidabile.
Architettura software e orchestrazione per l’affidabilità
Costruire un ADAS affidabile è un esercizio di ingegneria del software disciplinata. L’architettura scelta fin dall’inizio determina la robustezza del sistema, la sua tolleranza ai guasti e la sua manutenibilità לאורך il ciclo di vita del veicolo.
Per qualsiasi CTO o responsabile di prodotto, l’affidabilità non è una funzionalità da aggiungere in seguito; è una proprietà emergente dell’architettura del sistema. Il progetto deve assumere che i componenti si guasteranno e garantire che il sistema degradi in modo controllato verso uno stato sicuro invece di collassare in modo catastrofico.
Architetture monolitiche versus microservizi
Il dibattito architetturale tra approcci monolitici e microservizi ha implicazioni critiche per la sicurezza nel dominio automobilistico. Una tradizionale architettura monolitica, in cui tutte le funzioni sono strettamente accoppiate in un unico eseguibile, può sembrare più semplice da distribuire su una singola Electronic Control Unit (ECU).
Tuttavia, questo approccio è fragile. Un bug in una funzione non critica, come il riconoscimento dei segnali stradali, potrebbe destabilizzare l’intero sistema e compromettere funzionalità di sicurezza essenziali come la frenata di emergenza. Inoltre, gli aggiornamenti sono rischiosi, poiché una modifica minore richiede la rivalidazione dell’intero monolite.
Un design ispirato ai microservizi, adattato ai vincoli automobilistici, offre un’alternativa più resiliente. Questo approccio disaccoppia le funzioni in servizi indipendenti che comunicano tramite un bus interno ben definito.
- Isolamento: un guasto nel servizio di mantenimento della corsia è contenuto e non influenzerà il servizio di avviso di collisione frontale. Questo isolamento dei guasti è un pilastro della sicurezza funzionale.
- Aggiornamenti indipendenti: un nuovo modello di rilevamento dei pedoni può essere distribuito senza modificare o rivalidare la logica del cruise control adattivo. Ciò consente cicli di iterazione più rapidi e sicuri.
- Scalabilità: le risorse computazionali sui computer ad alte prestazioni (HPC) possono essere allocate dinamicamente in base alla criticità dell’attività, invece di trattare tutte le funzioni come equivalenti.
Una mentalità architetturale focalizzata sul disaccoppiamento e sulla tolleranza ai guasti è l’unica via praticabile. Un ADAS affidabile deve essere progettato per il guasto, non solo per la funzionalità. Il sistema deve essere architettato per rimanere in uno stato sicuro anche quando singoli componenti sono compromessi.
Per i team nuovi a questo paradigma, esplorare i principi della Service-Oriented Architecture (SOA) può fornire una solida base per costruire sistemi modulari e resilienti.
Sistemi operativi real-time e trasporto dei dati
I servizi software stessi richiedono un ambiente di esecuzione deterministico. Un ADAS dipende da un Real-Time Operating System (RTOS) per garantire che le attività critiche vengano completate entro le rispettive scadenze. A differenza di un sistema operativo generico, un RTOS fornisce la pianificazione prevedibile necessaria per le funzioni critiche per la sicurezza. Un termine di esecuzione mancato non è un problema di prestazioni; è un guasto del sistema.
L’infrastruttura di comunicazione tra questi componenti è altrettanto critica. Il tradizionale Controller Area Network (CAN bus) resta una soluzione affidabile e collaudata sul campo per comandi a bassa larghezza di banda come “applica i freni”.
Tuttavia, il CAN bus non dispone della larghezza di banda necessaria per gestire gli enormi flussi di dati provenienti dalle moderne camere, dal radar e dal LiDAR. Per questo, l’Automotive Ethernet funge da dorsale ad alta velocità, trasportando i dati grezzi dei sensori alle unità di elaborazione centrali in cui operano i modelli AI.
Manutenibilità tramite aggiornamenti OTA e osservabilità
Infine, una moderna architettura ADAS deve essere progettata per l’intero ciclo di vita operativo del veicolo. Gli aggiornamenti Over-the-Air (OTA) non sono più un lusso, ma un meccanismo essenziale per fornire patch di sicurezza, correzioni di bug e miglioramenti funzionali dopo la vendita del veicolo. Un’architettura modulare ben progettata rende gli aggiornamenti OTA significativamente più sicuri, consentendo aggiornamenti mirati ai singoli servizi invece di riscrivere l’intero sistema.
L’intero ciclo di vita deve essere supportato da una solida osservabilità. Il sistema deve registrare continuamente metriche di prestazione, errori e dati operativi. Questo offre ai team di ingegneria una visione in tempo reale dello stato della flotta, facilita la diagnostica remota e consente di verificare che un aggiornamento OTA abbia funzionato come previsto sul campo. Questo ciclo di feedback è il segno distintivo di un prodotto ADAS maturo e manutenibile.
Orientarsi tra standard di sicurezza e conformità
Se la conformità alla sicurezza viene trattata come un elemento di checklist finale, il progetto è già avviato verso il fallimento. Per qualsiasi ADAS, la sicurezza deve essere parte integrante dell’architettura del sistema fin dal concetto iniziale. Trascurarla porta a costose riprogettazioni, colli di bottiglia nella validazione e ritardi significativi nel lancio.
L’industria automobilistica opera sotto rigorosi standard di sicurezza per una buona ragione: la posta in gioco è enorme. Due standard sono centrali per qualsiasi sviluppo ADAS: ISO 26262 (Functional Safety) e ISO 21448 (Safety of the Intended Functionality, o SOTIF). Pur essendo correlati, affrontano tipi di rischio fondamentalmente diversi.
Non si tratta soltanto di un onere normativo. Il mercato ADAS è destinato a superare i 200 miliardi di USD entro il 2034, spinto da una domanda globale di riduzione delle vittime della strada. Questa domanda riguarda sistemi intelligenti, basati su AI, che soddisfino i più elevati standard di sicurezza e affidabilità. Puoi esplorare qui le proiezioni di mercato.
ISO 26262: Gestire i malfunzionamenti del sistema
ISO 26262 è lo standard fondamentale per la sicurezza funzionale automobilistica. Il suo focus è mitigare i rischi derivanti dal malfunzionamento dei sistemi elettrici ed elettronici. Fornisce un framework per costruire sistemi che non causino danni quando un sensore si guasta, si verifica un bug software o un processore presenta un fault.
Lo standard impone un processo sistematico di analisi dei pericoli e valutazione del rischio, classificando i potenziali guasti mediante i livelli Automotive Safety Integrity Levels (ASIL), e implementando le corrispondenti misure di sicurezza. Questo processo copre l’intero ciclo di sviluppo, dal concetto alla produzione.
ISO 26262 riguarda la gestione degli unknown knowns—malfunzionamenti prevedibili dell’hardware e del software. L’obiettivo è anticipare questi guasti e progettare contromisure robuste, come componenti ridondanti o modalità operative fail-safe, per garantire che il sistema degradi in modo controllato.
Per un team software, ciò richiede la dimostrazione della robustezza del codice, del rilevamento dei guasti e della capacità di passare a uno stato sicuro. Metodologie come il V-model, che integrano verifica e validazione לאורך tutto lo sviluppo, sono essenziali. Per un approfondimento, consulta la nostra guida su come il V-model supporta uno sviluppo software rigoroso.
SOTIF (ISO 21448): Quando un sistema funzionante si comporta in modo non sicuro
Mentre la ISO 26262 affronta i guasti del sistema, SOTIF (ISO 21448) si confronta con un problema più moderno e sfumato: un comportamento non sicuro che emerge da un sistema che funziona correttamente secondo il suo progetto, ma che si trova ad affrontare uno scenario reale che supera i suoi limiti di prestazione.
Questi sono gli unknown unknowns. I sensori del sistema percepiscono il mondo e il suo codice viene eseguito senza errori, ma la logica conduce comunque a un esito pericoloso.
Un classico scenario SOTIF:
- Una camera rileva correttamente un oggetto insolito e immobile sulla strada.
- Il modello di percezione, nonostante sia stato addestrato su vasti dataset, non ha mai incontrato questo oggetto specifico e lo classifica erroneamente come un innocuo sacchetto di plastica.
- Il veicolo procede ad alta velocità, mentre in realtà l’oggetto era un grande pezzo solido di carico caduto.
SOTIF si concentra sull’identificazione e la mitigazione di questi limiti prestazionali e casi limite. Richiede un enorme investimento nella validazione, inclusi milioni di miglia di simulazione e guida reale, per portare alla luce gli edge case in cui gli algoritmi del sistema possono rivelarsi insufficienti.
ISO 26262 vs SOTIF: un confronto pratico
Per i team di prodotto, comprendere questa distinzione è fondamentale per allocare le risorse e gestire il rischio. Questa tabella riassume le differenze principali.
| Aspetto | ISO 26262 (Functional Safety) | ISO 21448 (SOTIF) |
|---|---|---|
| Focus principale | Prevenire i pericoli derivanti da malfunzionamenti dei sistemi E/E. | Prevenire i pericoli quando il sistema funziona senza guasti. |
| Il problema | ”Il componente si è rotto." | "Il sistema ha funzionato come progettato, ma l’esito non era sicuro.” |
| Esempio | Un sensore radar si guasta e smette di inviare dati, causando la disattivazione dell’ACC. | Una camera interpreta erroneamente un’ombra come un ostacolo, causando una frenata non necessaria. |
| Causa principale | Guasti hardware casuali, bug software sistematici. | Limitazioni prestazionali, insufficienze dei sensori, edge case, uso improprio prevedibile. |
| Soluzione principale | Ridondanza, rilevamento dei guasti, meccanismi fail-safe, codice robusto. | Test estesi, simulazione, raccolta dati e affinamento degli algoritmi. |
| Parole chiave | Fault, failure, hazard, ASIL, safe state. | Limitazione prestazionale, evento scatenante, scenario non sicuro, validazione. |
| In sintesi, ISO 26262 garantisce che il sistema sia costruito correttamente, mentre SOTIF garantisce che si comporti correttamente in un mondo caotico e imprevedibile. Un prodotto ADAS sicuro e di successo commerciale richiede la padronanza di entrambe le discipline. |
Dal progetto alla realtà: una guida per i team di prodotto e ingegneria
Realizzare un sistema avanzato di assistenza alla guida è un’impresa significativa. Trattarlo come un semplice altro progetto software è una strada diretta verso il fallimento. Il successo richiede una strategia pragmatica che bilanci l’innovazione con le dure realtà della sicurezza, del debito tecnico e della manutenibilità a lungo termine.
Per i leader di prodotto e ingegneria, la sfida principale è sviluppare una roadmap realistica. Questo inizia dando priorità alle funzioni di sicurezza fondamentali. Un team deve padroneggiare capacità come l’Frenata Automatica di Emergenza (AEB) affidabile prima di perseguire funzioni di comfort o automazione più complesse.
Ogni nuova funzione aggiunge livelli di complessità e nuove modalità di guasto. Questo introduce debito tecnico che deve essere gestito in modo proattivo, non rinviato fino a quando non innesca un costoso richiamo.
La decisione build vs. buy
La questione “build vs. buy” è centrale in qualsiasi strategia ADAS. Cercare di sviluppare internamente ogni componente è raramente fattibile. Il grado di specializzazione richiesto per sensori, modelli di percezione e validazione della sicurezza è enorme. Un approccio ibrido è quasi sempre la via più prudente.
- Buy: Componenti commodity come telecamere e radar, oppure moduli software consolidati per funzioni di base come il rilevamento delle corsie, dovrebbero essere acquistati da fornitori specializzati. Questi fornitori hanno investito molto nella validazione e offrono economie di scala difficili da replicare.
- Build: La proprietà intellettuale principale e il vantaggio competitivo del tuo team risiedono nei livelli di integrazione e orchestrazione. È qui che crei valore: la logica di fusione dei sensori, gli algoritmi decisionali e l’architettura software che definisce il comportamento unico del tuo sistema.
La tua IP core non sono i singoli sensori o algoritmi. È l’intelligenza che li intreccia in un sistema coerente e affidabile. Concentrate la potenza ingegneristica su quel collante architetturale e sulla logica decisionale. È così che si costruisce un prodotto difendibile.
Una checklist pragmatica per fornitori e team
Sia che si valuti un fornitore terzo o la preparazione del proprio team, le domande fondamentali restano le stesse. Andate oltre le dimostrazioni di marketing e valutate la sostenibilità a lungo termine. Qualsiasi partner potenziale o responsabile di progetto interno deve fornire risposte concrete a questi punti:
-
Strategia dei dati e della validazione: Da dove verranno reperiti gli enormi dataset per l’addestramento e la validazione? Come acquisirai, etichetterai e gestirai questi dati? Qual è la tua strategia di simulazione per testare casi limite pericolosi che non possono essere replicati in sicurezza su strade pubbliche?
-
Integrità architetturale: Possono fornire una panoramica chiara dell’architettura del sistema? Come gestisce la tolleranza ai guasti e le condizioni di fail-safe? Come sono isolati i componenti software per prevenire guasti a cascata?
-
Manutenzione a lungo termine e OTA: Qual è il piano per distribuire gli aggiornamenti Over-the-Air (OTA) in modo sicuro e affidabile? Come monitorerai lo stato di salute e le prestazioni del sistema distribuito su tutta la flotta di veicoli?
-
Sicurezza incorporata e conformità: In che modo i principi di ISO 26262 e SOTIF sono integrati nel processo di sviluppo fin dal primo giorno? Quale documentazione ed evidenza possono essere fornite per corroborare le affermazioni di sicurezza?
Rispondere a queste domande con rigore tecnico fornisce un quadro per costruire un ADAS sostenibile, sicuro e manutenibile. Distingue gli operatori di mercato duraturi dagli esperimenti di breve durata.
Domande frequenti dei leader tecnici
Quando si sviluppa un sistema avanzato di assistenza alla guida, colmare il divario tra possibilità tecnica e realtà operativa è il punto in cui i progetti hanno successo o falliscono. Ecco le domande critiche che i leader di prodotto e ingegneria devono affrontare, con un focus sui compromessi del mondo reale.
Qual è il vero costo di costruire un ADAS?
Il costo iniziale di approvvigionamento per hardware e licenze software è solo una frazione dell’investimento totale. Le spese più significative sono incorporate nel ciclo di vita a lungo termine di sviluppo, validazione e manutenzione.
Questo dovrebbe essere considerato non come un acquisto di prodotto una tantum, ma come un impegno operativo a lungo termine. I principali fattori di costo includono:
- Operazioni sui dati: Acquisire, pulire, etichettare e archiviare petabyte di dati per l’addestramento e la validazione dei modelli è una spesa operativa continua e sostanziale.
- Validazione e simulazione: Le ore di ingegneria e l’infrastruttura di calcolo necessarie per eseguire milioni di miglia virtuali — oltre a estesi test nel mondo reale — per soddisfare standard come SOTIF sono enormi.
- Conformità e certificazione: Ottenere e mantenere certificazioni come ISO 26262 richiede documentazione rigorosa, controlli di processo severi e competenze specialistiche che devono essere integrate nel flusso di lavoro quotidiano del team.
Un budget che consideri solo i sensori e lo sviluppo software iniziale è incompleto e porterà al fallimento. Un modello finanziario realistico deve trattare queste attività operative a lungo termine come costi core del progetto.
Il vero investimento in un ADAS non è il codice scritto oggi. È l’infrastruttura costruita per validare, distribuire e mantenere in sicurezza quel codice per il prossimo decennio. Ti stai impegnando in un processo, non solo in un prodotto.
Come dovrebbero essere gestiti la privacy dei dati e il GDPR in un ADAS?
Un ADAS è un prolifico dispositivo di raccolta dati, che acquisisce video di spazi pubblici, comportamento del conducente e telemetria del veicolo. Questo rende la conformità a regolamenti come il GDPR e altre leggi sulla protezione dei dati un requisito architetturale fondamentale, non una funzionalità da aggiungere in seguito.
Per integrare la privacy by design, la tua architettura deve incorporare:
- Elaborazione all’edge: Quando possibile, elaborare i dati dei sensori direttamente sul veicolo. Questo riduce al minimo il volume di dati grezzi, potenzialmente identificabili, trasmessi al cloud.
- Anonimizzazione sistematica: Prima che qualsiasi dato lasci il veicolo per analisi sull’intera flotta, deve essere sistematicamente ripulito da tutte le informazioni personali identificabili (PII). Questo include l’offuscamento automatico di volti e targhe nei fotogrammi video.
- Governance chiara dei dati: Deve essere stabilita una solida policy di governance dei dati, che definisca con precisione quali dati vengono raccolti, il loro scopo, il periodo di conservazione e chi vi ha accesso. L’ambiguità rappresenta un significativo rischio legale e reputazionale.
Cercare di adattare i controlli sulla privacy a posteriori a un’architettura esistente è una strada verso l’esposizione legale e una catastrofica erosione della fiducia pubblica.
Le funzionalità ADAS possono prevenire tutti gli incidenti?
No, ed è imperativo essere trasparenti riguardo a questa limitazione. Un ADAS è progettato per assistere un conducente umano e mitigare il rischio, non per eliminarlo. Funziona come una sofisticata rete di sicurezza, ma con limiti intrinseci.
L’efficacia del sistema è vincolata dalle prestazioni dei sensori in condizioni meteorologiche avverse, dai casi limite algoritmici inevitabili e dall’imprevedibilità senza confini del mondo reale.
Gestire le aspettative è fondamentale. Il conducente è — e deve rimanere — in ultima analisi responsabile della guida sicura del veicolo. Posizionare correttamente la tecnologia non è negoziabile per gestire sia la responsabilità legale sia la fiducia degli utenti.
Costruire un Sistema Avanzato di Assistenza alla Guida sicuro e affidabile è una maratona ingegneristica complessa che richiede una profonda comprensione pragmatica di architettura, sicurezza e manutenzione a lungo termine. In Devisia, siamo specializzati nel trasformare ambiziose visioni tecniche in prodotti digitali affidabili e manutenibili. Forniamo competenze end-to-end per costruire e integrare i robusti sistemi software che alimentano il futuro della mobilità.
Scopri di più sul nostro approccio su https://www.devisia.pro.